












一种塔机任务的吊装循环数据统计与分析系统及方法-9479威尼斯
更新时间:2024-08-01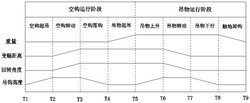 类型:发明专利;
类型:发明专利;地区:山西-太原;
源自:太原高价值专利检索信息库;
专利名称:一种塔机任务的吊装循环数据统计与分析系统及方法
专利类型:发明专利
专利申请号:cn202410311658.8
专利申请(专利权)人:山西六建集团有限公司
权利人地址:山西省太原市和平南路192号
专利发明(设计)人:刘艳丽,刘茂青,杨丹丹,翟艳军,张鹏程,韩东平,李丽丽,赵永亭,李振华,郭丽丽,杨占连,彭辉,王红英,李志刚,任安安
专利摘要:本发明涉及塔机运行效率与安全技术领域,具体是一种塔机任务的吊装循环数据统计与分析系统及方法,包括信息采集模块、控制模块和执行模块;在执行模块运行的过程中,实现吊钩的起钩和落钩,进而根据变幅编码器、回转编码器、高度编码器和重量传感器测得的数据变化来判断吊钩的运行阶段,进而得到吊装循环信息;吊钩的运行阶段包括空钩运行阶段和吊物运行阶段,空钩运行阶段包括空钩起吊阶段、空钩转动阶段、空钩落钩阶段、吊物起吊阶段;吊物运行阶段包括吊物上升阶段、吊物转动阶段、吊物下行阶段、触地卸钩阶段;通过对塔机运行吊装循环的数据进行统计和分析,可以提升作业效率,同时可以对塔机运行安全进行分析,实现对塔司的评价与管理。
主权利要求:
1.一种塔机任务的吊装循环数据统计与分析方法,其特征在于:该方法是基于一种塔机任务的吊装循环数据统计与分析系统实现的,该系统包括信息采集模块、控制模块和执行模块;
信息采集模块包括安装于变幅机构上的变幅编码器,用于测定塔机的变幅距离;
安装于回转机构上的回转编码器,用于测定塔机的回转角度;
安装于提升机构上的高度编码器,用于测定吊钩的起升高度;
安装于吊钩上的重量传感器,用于测定吊钩及吊物的重量;
执行模块包括塔机中的变幅机构、回转机构、提升机构;在变幅机构、回转机构、提升机构运行的过程中,实现吊钩的起钩和落钩过程,进而根据运行过程中变幅编码器、回转编码器、高度编码器和重量传感器测得的数据变化来判断吊钩的运行阶段,进而得到吊装循环信息;
控制模块包括用于接收信息的控制器以及数据终端;控制器将变幅编码器、回转编码器、高度编码器和重量传感器测得的数据进行处理并上传至数据终端,数据终端对数据进行保存并进行统计分析;
所述信息采集模块还包括安装于起重臂臂根处的摄像头ⅰ、安装于起重臂臂尖处的摄像头ⅱ、安装于小车上的摄像头ⅲ、安装于小车上的雷达ⅰ以及安装于起重臂臂尖处的雷达ⅱ;摄像头ⅰ、摄像头ⅱ和摄像头ⅲ用于抓拍吊钩和吊物的图片,便于识别吊物的种类,实现对不同吊物的吊装循环分析;
所述信息采集模块还包括安装于起重臂平面上的倾角传感器、安装于塔司室顶端的风速传感器,用于监测起重臂的水平度和风速;
该方法包括如下步骤:
步骤s1:塔机接收到吊装循环任务后,启动提升机构,并记录启动时间t1,然后使吊钩的高度从0m上升到hm,同时记录提升机构停止运行的时间t2,计算得到空钩起吊的时间为(t2‑t1)s,此时吊钩的重量为gkg,塔机的变幅距离为0m,塔机的回转角度为0°,吊钩的高度从0m上升到hm,判定为在(t2‑t1)s时间段内,吊钩处于空钩起吊阶段;
步骤s2:启动变幅机构和回转机构,使得起重臂的变幅距离达到l1m、回转角度达到θ
1°,并移动小车的位置,使得吊钩位于吊物的正上方,记录小车停止运行的时间t3,计算得到空钩运行的时间为(t3‑t2)s;此时吊钩的重量为gkg,塔机的变幅距离从0m增大为l1m,塔机的回转角度从0°增大到θ1°,吊钩的高度为hm,判定为在(t3‑t2)s时间段内,吊钩处于空钩转动阶段;
步骤s3:启动提升机构,使得吊钩的高度从hm下降到0m,同时记录提升机构停止运行的时间t4,计算得到空钩落钩的时间为(t4‑t3)s;此时吊钩的重量为gkg,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度从hm下降到0m,判定为在(t4‑t3)s时间段内,吊钩处于空钩落钩阶段;
步骤s4:地面工作人员将吊钩与吊物固定连接,并向塔司发送起吊信号,启动提升机构,当吊物安全脱离地面后,记录吊钩的重量不在增加的时间t5,计算得到吊物起吊的时间为(t5‑t4)s;此时吊钩的重量从gkg增加到(g g)kg,g为吊物的重量,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度为hm,判定为在(t5‑t4)s时间段内,吊钩处于吊物起吊阶段;hm为吊物的高度;
步骤s5:启动提升机构,使得吊钩的高度从hm上升到hm,同时记录提升机构停止运行的时间t6,计算得到吊物上升的时间为(t6‑t5)s,此时吊钩的重量为(g g)kg,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度从hm上升到hm,判定为在(t6‑t5)s时间段内,吊钩处于吊物上升阶段;
步骤s6:启动变幅机构和回转机构,使得塔机的变幅距离从l1m变化为l2m、回转角度从θ1°变化为θ2°,并移动小车的位置,使得吊物位于目标地点的正上方,记录小车停止运行的时间t7,计算得到吊物运行的时间为(t7‑t6)s,此时吊钩的重量为(g g)kg,塔机的变幅距离从l1m变化为l2m,塔机的回转角度从θ1°变化为θ2°,吊钩的高度为hm,判定为在(t7‑t6)s时间段内,吊钩处于吊物转动阶段;
步骤s7:启动提升机构,使得吊钩的高度从hm下降到hm,同时记录提升机构停止运行的时间t8,计算得到吊物下行的时间为(t8‑t7)s,此时吊钩的重量为(g g)kg,塔机的变幅距离为l2m,塔机的回转角度为θ2°,吊钩的高度从hm下降到hm,判定为在(t8‑t7)s时间段内,吊钩处于吊物下行运行阶段;
步骤s8:启动提升机构,使得吊钩的高度从hm下降到0m,此时吊物触地,地面的工作人员将吊物从吊钩上卸下,并向塔司发送卸钩完成信号,记录卸钩完成信号发送的时间为t9,计算得到触地卸钩的时间为(t9‑t8)s,此时吊钩的重量从(g g)kg降低至gkg,塔机的变幅距离为l2m,塔机的回转角度为θ2°,吊钩的高度为0m,判定为在(t9‑t8)s时间段内,吊钩处于触地卸钩阶段。
2.根据权利要求1所述的一种塔机任务的吊装循环数据统计与分析方法,其特征在于:
从所述步骤s1开始时刻到下一个步骤s1开始时刻为一次吊装循环;计算得到完成一次吊装循环的时间为从一个吊装任务的t1s开始到下一个吊装任务的t1s结束,并将多次吊装循环的时间通过控制器传输到数据终端进行保存以及统计分析。
3.根据权利要求1所述的一种塔机任务的吊装循环数据统计与分析方法,其特征在于:
所述摄像头ⅰ、摄像头ⅱ和摄像头ⅲ在所述步骤s3 步骤s6中每隔ts抓拍吊钩和吊物的图~
像,并将图像通过控制器传输到数据终端进行保存,并与数据终端预存的吊物图像对比后识别得到吊物信息,吊物信息还包括在吊物起吊阶段得到的吊物的高度hm,并将吊装循环信息和吊物信息匹配后存储归档,便于统计分析,实现对不同吊物的吊装循环分析。 说明书 : 一种塔机任务的吊装循环数据统计与分析系统及方法技术领域[0001] 本发明涉及塔机运行效率与安全技术领域,具体是一种塔机任务的吊装循环数据统计与分析系统及方法。背景技术[0002] 塔机作为施工现场应用时间最长、应用范围最广的吊运设备之一,塔机的运行效率是影响施工进度、降低成本的重要因素,而吊装循环数据是衡量塔机工作效率的重要指标之一。[0003] 塔机任务的吊装循环是指塔机从空钩到吊运结束的一个流程,依次从空钩起钩、空钩运行、空钩落钩、司索工绑钩、吊物起钩、吊物空中运行、吊物落钩、司索工卸钩为一个吊装循环。[0004] 现有技术中多是利用传感器获得吊物的重量信息、起升高度信息、变幅距离信息以及回转角度信息实现对起落钩时间的判断,进而实现对塔机任务的吊装循环的识别,但很少有研究塔机任务的吊装循环的整个过程,也缺少基于塔机任务的吊装循环数据的塔机运行效率和安全的分析,难以实现对塔司以及运行安全的评价和有效管理。[0005] 因此有必要发明一种塔机任务的吊装循环数据统计与分析系统及方法来解决上述问题。发明内容[0006] 本发明为了解决现有针对塔机的吊装循环数据的研究存在缺少基于塔机任务的吊装循环数据的塔机运行效率和安全的分析进而难以实现对塔司以及运行安全的评价和有效管理的问题,提供了一种塔机任务的吊装循环数据统计与分析系统及方法。[0007] 本发明是采用如下技术方案实现的:[0008] 一种塔机任务的吊装循环数据统计与分析系统,包括信息采集模块、控制模块和执行模块;[0009] 信息采集模块包括安装于变幅机构上的变幅编码器,用于测定塔机的变幅距离;[0010] 安装于回转机构上的回转编码器,用于测定塔机的回转角度;[0011] 安装于提升机构上的高度编码器,用于测定吊钩的起升高度;[0012] 安装于吊钩上的重量传感器,用于测定吊钩及吊物的重量;[0013] 执行模块包括塔机中的变幅机构、回转机构、提升机构;在变幅机构、回转机构、提升机构运行的过程中,实现吊钩的起钩和落钩过程,进而根据运行过程中变幅编码器、回转编码器、高度编码器和重量传感器测得的数据变化来判断吊钩的运行阶段,进而得到吊装循环信息;[0014] 控制模块包括用于接收信息的控制器以及数据终端;控制器将变幅编码器、回转编码器、高度编码器和重量传感器测得的数据进行处理并上传至数据终端,数据终端对数据进行保存并进行统计分析。[0015] 进一步地,所述信息采集模块还包括安装于起重臂臂根处的摄像头ⅰ、安装于起重臂臂尖处的摄像头ⅱ、安装于小车上的摄像头ⅲ、安装于小车上的雷达ⅰ以及安装于起重臂臂尖处的雷达ⅱ;摄像头ⅰ、摄像头ⅱ和摄像头ⅲ用于抓拍吊钩和吊物的图片,便于识别吊物的种类,实现对不同吊物的吊装循环分析;[0016] 所述信息采集模块还包括安装于起重臂平面上的倾角传感器、安装于塔司室顶端的风速传感器,用于监测起重臂的水平度和风速。[0017] 一种塔机任务的吊装循环数据统计与分析方法,该方法包括如下步骤:[0018] 步骤s1:塔机接收到吊装循环任务后,启动提升机构,并记录启动时间t1,然后使吊钩的高度从0m上升到hm,同时记录提升机构停止运行的时间t2,计算得到空钩起吊的时间为(t2‑t1)s,此时吊钩的重量为gkg,塔机的变幅距离为0m,塔机的回转角度为0°,吊钩的高度从0m上升到hm,判定为在(t2‑t1)s时间段内,吊钩处于空钩起吊阶段;[0019] 步骤s2:启动变幅机构和回转机构,使得起重臂的变幅距离达到l1m、回转角度达到θ1°,并移动小车的位置,使得吊钩位于吊物的正上方,记录小车停止运行的时间t3,计算得到空钩运行的时间为(t3‑t2)s;此时吊钩的重量为gkg,塔机的变幅距离从0m增大为l1m,塔机的回转角度从0°增大到θ1°,吊钩的高度为hm,判定为在(t3‑t2)s时间段内,吊钩处于空钩转动阶段;[0020] 步骤s3:启动提升机构,使得吊钩的高度从hm下降到0m,同时记录提升机构停止运行的时间t4,计算得到空钩落钩的时间为(t4‑t3)s;此时吊钩的重量为gkg,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度从hm下降到0m,判定为在(t4‑t3)s时间段内,吊钩处于空钩落钩阶段;[0021] 步骤s4:地面工作人员将吊钩与吊物固定连接,并向塔司发送起吊信号,启动提升机构,当吊物安全脱离地面后,记录吊钩的重量不在增加的时间t5,计算得到吊物起吊的时间为(t5‑t4)s;此时吊钩的重量从gkg增加到(g g)kg,g为吊物的重量,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度为hm,判定为在(t5‑t4)s时间段内,吊钩处于吊物起吊阶段;hm为吊物的高度;[0022] 步骤s5:启动提升机构,使得吊钩的高度从hm上升到hm,同时记录提升机构停止运行的时间t6,计算得到吊物上升的时间为(t6‑t5)s,此时吊钩的重量为(g g)kg,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度从hm上升到hm,判定为在(t6‑t5)s时间段内,吊钩处于吊物上升阶段;[0023] 步骤s6:启动变幅机构和回转机构,使得塔机的变幅距离从l1m变化为l2m、回转角度从θ1°变化为θ2°,并移动小车的位置,使得吊物位于目标地点的正上方,记录小车停止运行的时间t7,计算得到吊物运行的时间为(t7‑t6)s,此时吊钩的重量为(g g)kg,塔机的变幅距离从l1m变化为l2m,塔机的回转角度从θ1°变化为θ2°,吊钩的高度为hm,判定为在(t7‑t6)s时间段内,吊钩处于吊物转动阶段;[0024] 步骤s7:启动提升机构,使得吊钩的高度从hm下降到hm,同时记录提升机构停止运行的时间t8,计算得到吊物下行的时间为(t8‑t7)s,此时吊钩的重量为(g g)kg,塔机的变幅距离为l2m,塔机的回转角度为θ2°,吊钩的高度从hm下降到hm,判定为在(t8‑t7)s时间段内,吊钩处于吊物下行运行阶段;[0025] 步骤s8:启动提升机构,使得吊钩的高度从hm下降到0m,此时吊物触地,地面的工作人员将吊物从吊钩上卸下,并向塔司发送卸钩完成信号,记录卸钩完成信号发送的时间为t9,计算得到触地卸钩的时间为(t9‑t8)s,此时吊钩的重量从(g g)kg降低至gkg,塔机的变幅距离为l2m,塔机的回转角度为θ2°,吊钩的高度为0m,判定为在(t9‑t8)s时间段内,吊钩处于触地卸钩阶段。[0026] 进一步地,从所述步骤s1开始时刻到下一个步骤s1开始时刻为一次吊装循环;计算得到完成一次吊装循环的时间为从一个吊装任务的t1s开始到下一个吊装任务的t1s结束,并将多次吊装循环的时间通过控制器传输到数据终端进行保存以及统计分析。[0027] 进一步地,所述摄像头ⅰ、摄像头ⅱ和摄像头ⅲ在所述步骤s3 步骤s6中每隔ts抓~拍吊钩和吊物的图像,并将图像通过控制器传输到数据终端进行保存,并与数据终端预存的吊物图像对比后识别得到吊物信息,吊物信息还包括在吊物起吊阶段得到的吊物的高度hm,并将吊装循环信息和吊物信息匹配后存储归档,便于统计分析,实现对不同吊物的吊装循环分析。[0028] 本发明结构设计合理可靠,通过对塔机运行吊装循环的数据进行统计和分析,可以提升作业效率,减少工期从而降低成本,同时还可以对塔机运行安全进行分析,实现对塔司的评价与管理,实现对运行风险的规避。附图说明[0029] 图1是本发明中吊装循环的示意图。具体实施方式[0030] 一种塔机任务的吊装循环数据统计与分析系统,包括信息采集模块、控制模块和执行模块;[0031] 信息采集模块包括安装于变幅机构上的变幅编码器,用于测定塔机的变幅距离;[0032] 安装于回转机构上的回转编码器,用于测定塔机的回转角度;[0033] 安装于提升机构上的高度编码器,用于测定吊钩的起升高度;[0034] 安装于吊钩上的重量传感器,用于测定吊钩及吊物的重量;[0035] 执行模块包括塔机中的变幅机构、回转机构、提升机构;在变幅机构、回转机构、提升机构运行的过程中,实现吊钩的起钩和落钩过程,进而根据运行过程中变幅编码器、回转编码器、高度编码器和重量传感器测得的数据变化来判断吊钩的运行阶段,进而得到吊装循环信息;[0036] 控制模块包括用于接收信息的控制器以及数据终端;控制器将变幅编码器、回转编码器、高度编码器和重量传感器测得的数据进行处理并上传至数据终端,数据终端对数据进行保存并进行统计分析。[0037] 如附图1所示,所述吊钩的运行阶段包括空钩运行阶段和吊物运行阶段;[0038] 空钩运行阶段包括:[0039] 空钩起吊阶段,吊钩的重量为gkg,塔机的变幅距离为0m,塔机的回转角度为0°,吊钩的高度从0m上升到hm;[0040] 空钩转动阶段,吊钩的重量为gkg,塔机的变幅距离从0m增大为l1m,塔机的回转角度从0°增大到θ1°,此时吊钩位于吊物正上方,吊钩的高度为hm;[0041] 空钩落钩阶段,吊钩的重量为gkg,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度从hm下降到0m;此时吊钩触地,工作人员开始将吊物固定于吊钩上;[0042] 吊物起吊阶段,吊钩的重量从gkg增加到(g g)kg,g为吊物的重量,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度为hm;hm为吊物的高度;[0043] 吊物运行阶段包括:[0044] 吊物上升阶段,吊钩的重量为(g g)kg,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度从hm上升到hm;[0045] 吊物转动阶段,吊钩的重量为(g g)kg,塔机的变幅距离从l1m变化为l2m,塔机的回转角度从θ1°变化为θ2°,此时吊物位于目标地点的正上方,吊钩的高度为hm;[0046] 吊物下行阶段,吊钩的重量为(g g)kg,塔机的变幅距离为l2m,塔机的回转角度为θ2°,吊钩的高度从hm下降到hm;[0047] 触地卸钩阶段,吊钩的重量从(g g)kg降低至gkg,塔机的变幅距离为l2m,塔机的回转角度为θ2°,吊钩的高度为0m;此时吊物触地,工作人员开始将吊物从吊钩上卸下。[0048] 本发明根据吊钩和吊物的重量变化将吊装循环分为空钩运行阶段和吊物运行阶段,再根据塔机的变幅距离、回转角度、以及吊钩的起升高度作为判断参数,将空钩运行阶段和吊物运行阶段再次分别细分为四个小阶段,将塔机每一次的运行详细划分并记录下来,便于数据统计和分析。[0049] 所述信息采集模块还包括安装于起重臂臂根处的摄像头ⅰ、安装于起重臂臂尖处的摄像头ⅱ、安装于小车上的摄像头ⅲ、安装于小车上的雷达ⅰ以及安装于起重臂臂尖处的雷达ⅱ;摄像头ⅰ、摄像头ⅱ和摄像头ⅲ用于抓拍吊钩和吊物的图片,便于识别吊物的种类,实现对不同吊物的吊装循环分析;雷达ⅰ用来实现对吊物附近障碍物的检测,实现对障碍物碰撞的预警;雷达ⅱ用来检测相邻塔机与本塔机之间的距离,实现相邻塔机的防碰撞预警。[0050] 所述信息采集模块还包括安装于起重臂平面上的倾角传感器、安装于塔司室顶端的风速传感器,用于监测起重臂的水平度和风速。[0051] 雷达ⅰ、雷达ⅱ、倾角传感器和风速传感器均能够在塔机出现运行风险时发出提示警报,保证塔机的运行安全。[0052] 一种塔机任务的吊装循环数据统计与分析方法,如附图1所示;该方法包括如下步骤:[0053] 步骤s1:塔机接收到吊装循环任务后,启动提升机构,并记录启动时间t1,然后使吊钩的高度从0m上升到hm,同时记录提升机构停止运行的时间t2,计算得到空钩起吊的时间为(t2‑t1)s,此时吊钩的重量为gkg,塔机的变幅距离为0m,塔机的回转角度为0°,吊钩的高度从0m上升到hm,判定为在(t2‑t1)s时间段内,吊钩处于空钩起吊阶段;[0054] 步骤s2:启动变幅机构和回转机构,使得起重臂的变幅距离达到l1m、回转角度达到θ1°,并移动小车的位置,使得吊钩位于吊物的正上方,记录小车停止运行的时间t3,计算得到空钩运行的时间为(t3‑t2)s;此时吊钩的重量为gkg,塔机的变幅距离从0m增大为l1m,塔机的回转角度从0°增大到θ1°,吊钩的高度为hm,判定为在(t3‑t2)s时间段内,吊钩处于空钩转动阶段;[0055] 步骤s3:启动提升机构,使得吊钩的高度从hm下降到0m,同时记录提升机构停止运行的时间t4,计算得到空钩落钩的时间为(t4‑t3)s;此时吊钩的重量为gkg,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度从hm下降到0m,判定为在(t4‑t3)s时间段内,吊钩处于空钩落钩阶段;[0056] 步骤s4:地面工作人员将吊钩与吊物固定连接,并向塔司发送起吊信号,启动提升机构,当吊物安全脱离地面后,记录吊钩的重量不在增加的时间t5,计算得到吊物起钩的时间为(t5‑t4)s;此时吊钩的重量从gkg增加到(g g)kg,g为吊物的重量,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度为hm,判定为在(t5‑t4)s时间段内,吊钩处于吊物起吊阶段;hm为吊物的高度;[0057] 步骤s5:启动提升机构,使得吊钩的高度从hm上升到hm,同时记录提升机构停止运行的时间t6,计算得到吊物上升的时间为(t6‑t5)s,此时吊钩的重量为(g g)kg,塔机的变幅距离为l1m,塔机的回转角度为θ1°,吊钩的高度从hm上升到hm,判定为在(t6‑t5)s时间段内,吊钩处于吊物上升阶段;[0058] 步骤s6:启动变幅机构和回转机构,使得塔机的变幅距离从l1m变化为l2m、回转角度从θ1°变化为θ2°,并移动小车的位置,使得吊物位于目标地点的正上方,记录小车停止运行的时间t7,计算得到吊物运行的时间为(t7‑t6)s,此时吊钩的重量为(g g)kg,塔机的变幅距离从l1m变化为l2m,塔机的回转角度从θ1°变化为θ2°,吊钩的高度为hm,判定为在(t7‑t6)s时间段内,吊钩处于吊物转动阶段;[0059] 步骤s7:启动提升机构,使得吊钩的高度从hm下降到hm,同时记录提升机构停止运行的时间t8,计算得到吊物下行的时间为(t8‑t7)s,此时吊钩的重量为(g g)kg,塔机的变幅距离为l2m,塔机的回转角度为θ2°,吊钩的高度从hm下降到hm,判定为在(t8‑t7)s时间段内,吊钩处于吊物下行运行阶段;[0060] 步骤s8:启动提升机构,使得吊钩的高度从hm下降到0m,此时吊物触地,地面的工作人员将吊物从吊钩上卸下,并向塔司发送卸钩完成信号,记录卸钩完成信号发送的时间为t9,计算得到触地卸钩的时间为(t9‑t8)s,此时吊钩的重量从(g g)kg降低至gkg,塔机的变幅距离为l2m,塔机的回转角度为θ2°,吊钩的高度为0m,判定为在(t9‑t8)s时间段内,吊钩处于触地卸钩阶段。[0061] 从所述步骤s1开始时刻到下一个步骤s1开始时刻为一次吊装循环;计算得到完成一次吊装循环的时间为从一个吊装任务的t1s开始到下一个吊装任务的t1s结束,并将多次吊装循环的时间通过控制器传输到数据终端进行保存以及统计分析。[0062] 所述摄像头ⅰ、摄像头ⅱ和摄像头ⅲ在所述步骤s3 步骤s6中每隔ts抓拍吊钩和吊~物的图像,并将图像通过控制器传输到数据终端进行保存,并与数据终端预存的吊物图像对比后识别得到吊物信息,吊物信息还包括在吊物起吊阶段得到的吊物的高度hm,并将吊装循环信息和吊物信息匹配后存储归档,便于统计分析,实现对不同吊物的吊装循环分析。[0063] 在实际的施工现场,不同种类的吊物具有不同的形状、重量和落钩地点,这对于塔司的操作方式会有很大影响,从而影响吊钩的起钩、落钩以及空中运行的操作时间,因此不同吊物的吊运效率是不同的,因此需要对吊物类型进行精准的识别,从而实现对不同吊物的吊装循环阶段的识别,完成效率的分析与对比。[0064] 通过摄像头ⅰ、摄像头ⅱ和摄像头ⅲ抓拍到吊物在运行过程中的图像,并将抓拍到的图像上传到云端,并在数据终端中进行存储,需要时对图像信息进行解压缩和调用,从而实现吊物类型的识别。[0065] 具体实施过程中,针对重量的精准识别对于吊装循环的识别具有重要的意义,在实际运行过程中,受到塔机加速度的影响以及塔司在空中对吊钩进行高度调整的影响,吊钩和吊物的重量存在上下浮动的情况,仅依靠某一时间节点的重量变化,可能会对吊装循环的阶段产生误判,因此采用以下方式对重量数据进行处理:[0066] 原始的重量数据首先需要经过中值滤波进行预处理,消除重量数据的抖动;再通过取众数和中间消抖的方式,实现重量数据的一次滤波;通过数据上限限幅和二值化处理,实现重量的二次滤波;反映一个阶段内的重量变化趋势。[0067] 现场施工环境复杂,抓拍到的图像以及塔机运行的数据(包括各个阶段的变幅距离、回转角度、起升高度、吊钩重量、风速以及倾角信息)采用无线网桥进行远距离传输,无线网桥的一端安装在塔机固定不动的平台上,另一端安装在接收端。[0068] 尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
专利地区:山西
专利申请日期:2024-03-19
专利公开日期:2024-07-09
专利公告号:cn117902487b
以上信息来自国家知识产权局,如信息有误请联系我方更正!


