












一种关节模组及协作机器人的散热装置发明专利-9479威尼斯
更新时间:2024-08-01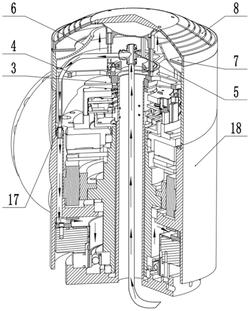 类型:发明专利;
类型:发明专利;地区:浙江-台州;
源自:台州高价值专利检索信息库;
专利名称:一种关节模组及协作机器人的散热装置
专利类型:发明专利
专利申请号:cn202210656034.0
专利申请(专利权)人:浙江环动机器人关节科技股份有限公司
权利人地址:浙江省台州市玉环市玉城街道机电产业功能区
专利发明(设计)人:张靖,王永波,王剑峰,谢发祥
专利摘要:本发明提供了一种关节模组及协作机器人的散热装置,该装置包括气源、进气组件、引气组件、排气组件以及除湿组件。该装置中由气源产生气流,经由三通管、内部进气管、进气嘴、关节壳体,进入减速器内腔,随后通过关节壳体多组通气孔道排出,利用关节运行时的转动带动排气风扇工作,将带热气体经由导流罩、通风罩排出,而通风罩、导流罩及干燥剂等的组合结构则起到一定的防尘除湿作用;本发明在保证关节模组结构紧凑的前提下,达到了减速器散热、电机散热、驱动器散热等多级散热的效果,由多关节组成的协作机器人则通过三通管完成气流的分配,达到整机散热的效果。
主权利要求:
1.一种关节模组的散热装置,其特征在于包括进气组件、引气组件、排气组件以及除湿组件;
所述进气组件包括:内部进气管(11)、弹性片(13)、橡胶圈(12)、固管支架(4)、三通管(5)、轴承(2)和进气嘴(17);
所述引气组件包括关节壳体(18)和导流罩(6);
所述排气组件包括关节模组输出轴(1)、排气风扇(3)和通风罩(8);
所述除湿组件包括干燥剂(10)、挡板(7)和顶盖(9);
其中,轴承(2)安装在关节模组的输出轴(1)上,固管支架(4)包括内圈和与内圈连接的若干支臂,固管支架(4)的内圈套坐在轴承(2)上,各支臂外端锁紧在关节壳体(18)上,弹性片(13)固定在固管支架(4)上,橡胶圈(12)则嵌于弹性片(13)中,所述三通管(5)具有一个气体入口和两个气体出口,其中一个气体出口通过内部进气管(11)穿过固管支架(4)并插入安装于关节壳体(18)上的进气嘴(17);三通管(5)的气体入口通过进气管路连接外部气源,另一个气体出口连接出气管路,出气管路在使用时封堵住或者连接下一级关节模组进行供气;所述进气管路或出气管路中,至少一条管路穿过橡胶圈(12),由橡胶圈(12)进行支撑;
所述关节壳体(18)上带有多组均布的带螺纹贯通孔,其中一组用于安装进气嘴(17),其他的贯通孔则用于热气流的排出,导流罩(6)中间设置通孔,其通过其自有阶梯面嵌于关节壳体(18)内;
所述排气风扇(3)通过固定于关节模组输出轴(1)的台阶面上,通风罩(8)位于导流罩(6)上方,其固定在关节壳体(18)上;其中通风罩(8)顶部具有内凹的型腔,侧面布有多组出风口,每组出风口间开有引流槽;
挡板(7)与通风罩(8)连接,并利用通风罩(8)压紧在导流罩(6)上,导流罩(6)与挡板(7)间布有干燥剂(10),顶盖(9)通过螺钉锁紧在通风罩(8)的型腔上,型腔内布有干燥剂(10)。
2.根据权利要求1所述的关节模组的散热装置,其特征在于,所述的固管支架(4)通过内圈套坐在轴承上,支臂外端利用第三铜锣柱(16)锁紧在关节壳体(18),弹性片(13)通过第二铜锣柱(15)锁紧在固管支架(4)上。
3.根据权利要求1所述的关节模组的散热装置,其特征在于,所述关节壳体(18)作为关节模组的外壳;所述关节模组设置在关节外壳内部,关节壳体(18)的内壁上具有一块与关节模组轴向方向垂直的环形安装板,所述安装板上沿周向均布多个所述的带螺纹贯通孔,贯通孔贯通安装板的上下区域。
4.根据权利要求1所述的关节模组的散热装置,其特征在于,通风罩(8)外底部带有勾角槽,内底部带有四组缺口,所述挡板(7)具有四组引脚,通过其引脚卡扣在通风罩(8)的四组缺口内,利用通风罩(8)压紧在导流罩(6)上;所述通风罩(8)还通过第一铜锣柱(14)与固管支架(4)锁紧连接。
5.根据权利要求1所述的关节模组的散热装置,其特征在于,所述轴承(2)安装在关节模组的输出轴(1)的上端部;所述固管支架的内圈底部套坐在轴承上,固管支架整体位于输出轴(1)的上端部;所述弹性片(13)、橡胶圈(12)、三通管(5)均位于固管支架的上方,弹性片、橡胶圈和固管支架组成的结构用于固定进气管路或出气管路,防止划伤、过弯堵塞。
6.根据权利要求1所述的关节模组的散热装置,其特征在于,所述三通管(5)连接的其中一条气体管路经橡胶圈(12)后穿过固管支架的内圈并贯穿关节模组的输出轴(1)与外部连接;另一条气体管路穿出关节外壳(18)与外部连接;上述两条气体管路任一条作为进气管路,另一条作为出气管路。
7.根据权利要求1所述的关节模组的散热装置,其特征在于,所述导流罩(6)沿气流方向呈渐缩喇叭状,其大径端与关节壳体(18)内壁固定连接,小径端设置所有通孔;且小径端与通风罩(8)之间预留有距离作为散热通道。
8.一种协作机器人的散热装置,所述协作机器人包括多个关节模组,每个关节模组上均设置有权利要求1所述的散热装置;其中,相邻关节模组的散热装置的进气管路与出气管路相连接,形成连通的气路,即上一级散热装置的出气管路作为下一级级散热装置的气源;
第一级关节模组的散热装置的进气管路连接气源,最后一级关节模组的散热装置的出气管路堵塞或关闭。 说明书 : 一种关节模组及协作机器人的散热装置技术领域[0001] 本发明主要涉及机器人技术领域,特别涉及到一种关节模组及协作机器人的散热装置。背景技术[0002] 在当代工业发展浪潮下,机器人的使用如火如荼,作为机器人家族的核心成员——协作机器人则宛如一颗新星,在多个应用领域开花结果。而随着协作机器人的大量使用,其中一些问题点也逐渐暴露出来,其中最重要的就有关节的散热问题,关节的过热则直接影响其使用性能;由于协作机器人本身的结构特性——紧凑、精密且快速运动,如何进行散热处理则成为一大难点,现有的散热一般都是在表壳进行处理或者依托关节组件本身的散热功能,这只能起到一定的散热效果,远远无法达到核心产热区——减速器产热区、电机产热区、驱动器产热区的散热,从而影响整个机器人的使用质量及使用周期。[0003] 综上,如何做到关节模组的核心区散热是我们现在需要解决的关键性问题。发明内容[0004] 本发明的主要目的是提供一种关节模组及协作机器人的散热装置,以解决现有关节模组及协作机器人散热处理能力不足的缺点。[0005] 为完成上述目的,本发明的技术方案如下:[0006] 本发明首先提供了一种关节模组的散热装置,其包括进气组件、引气组件、排气组件以及除湿组件;[0007] 所述进气组件包括:内部进气管、弹性片、橡胶圈、固管支架、三通管、轴承和进气嘴;[0008] 所述引气组件包括关节壳体和导流罩;[0009] 所述排气组件包括关节模组输出轴、排气风扇和通风罩;[0010] 所述除湿组件包括干燥剂、挡板和顶盖;[0011] 其中,轴承安装在关节模组的输出轴上,固管支架包括内圈和与内圈连接的若干支臂,固管支架的内圈套坐在轴承上,各支臂外端锁紧在关节壳体上,弹性片固定在固管支架上,橡胶圈则嵌于弹性片中,所述三通管具有一个气体入口和两个气体出口,其中一个气体出口通过内部进气管穿过固管支架并插入安装于关节壳体上的进气嘴;三通管的气体入口通过进气管路连接外部气源,另一个气体出口连接出气管路,出气管路在使用时封堵住或者连接下一级关节模组进行供气;所述进气管路或出气管路中,至少一条管路穿过橡胶圈,由橡胶圈进行支撑;[0012] 所述关节壳体上带有多组均布的带螺纹贯通孔,其中一组用于安装进气嘴,其他的贯通孔则用于热气流的排出,导流罩中间设置通孔,其通过其自有阶梯面嵌于关节壳体内;[0013] 所述排气风扇通过固定于关节模组输出轴的台阶面上,通风罩位于导流罩上方,其固定在关节壳体上;其中通风罩顶部具有内凹的型腔,侧面布有多组出风口,每组出风口间开有引流槽;[0014] 挡板与通风罩连接,并利用通风罩压紧在导流罩上,导流罩与挡板间布有干燥剂,顶盖通过螺钉锁紧在通风罩的型腔上,型腔内布有干燥剂。[0015] 作为本发明的优选方案,所述的固管支架通过内圈套坐在轴承上,支臂外端利用第三铜锣柱锁紧在关节壳体,弹性片通过第二铜锣柱锁紧在固管支架上。[0016] 作为本发明的优选方案,所述关节壳体作为关节模组的外壳;所述关节模组设置在关节外壳内部,关节壳体的内壁上具有一块与关节模组轴向方向垂直的环形安装板,所述安装板上沿周向均布多个所述的带螺纹贯通孔,贯通孔贯通安装板的上下区域。[0017] 作为本发明的优选方案,通风罩外底部带有勾角槽,内底部带有四组缺口,所述挡板具有四组引脚,通过其引脚卡扣在通风罩的四组缺口内,利用通风罩压紧在导流罩上;所述通风罩还通过第一铜锣柱与固管支架锁紧连接。[0018] 作为本发明的优选方案,所述轴承安装在关节模组的输出轴的上端部;所述固管支架的内圈底部套坐在轴承上,固管支架整体位于输出轴的上端部;所述弹性片、橡胶圈、三通管均位于固管支架的上方,弹性片、橡胶圈和固管支架组成的结构用于固定进气管路或出气管路,防止划伤、过弯堵塞。[0019] 作为本发明的优选方案,所述三通管连接的其中一条气体管路经橡胶圈后穿过固管支架的内圈并贯穿关节模组的输出轴与外部连接;另一条气体管路穿出关节外壳与外部连接;上述两条气体管路任一条作为进气管路,另一条作为出气管路。[0020] 作为本发明的优选方案,所述导流罩沿气流方向呈渐缩喇叭状,其大径端与关节壳体内壁固定连接,小径端设置所有通孔;且小径端与通风罩之间预留有距离作为散热通道。[0021] 本发明还提供了一种协作机器人的散热装置,所述协作机器人包括多个关节模组,每个关节模组上均设置有上述关节模组的散热装置;其中,相邻关节模组的散热装置的进气管路与出气管路相连接,形成连通的气路,即上一级散热装置的出气管路作为下一级级散热装置的气源;第一级关节模组的散热装置的进气管路连接气源,最后一级关节模组的散热装置的出气管路堵塞或关闭。[0022] 本发明的有益效果是:[0023] 1、多级散热。本发明中由气源产生的气流,经过减速器内腔,随后通过关节壳体多组通气孔道排出,利用关节运行时的转动带动排气风扇工作,将带热气体经由导流罩、通风罩排出,实现了减速器散热、电机散热、驱动器散热,完成核心产热区的散热功能,这是现有关节模组所没有的散热功能。[0024] 2、结构紧凑。本发明在常用的关节模组基础上进行小范围调整,在完成散热功能的前提下不影响关节模组本身的结构紧凑性,使得本发明具有良好的推广适应性。[0025] 3、防尘除湿。本发明在完成散热功能的基础上,一定程度防止了外部杂质和液化水污染关节模组内部组件。附图说明[0026] 图1为本发明一种关节模组及协作机器人的散热装置带关节模组结构示意图;[0027] 图2为图1的剖切示意图;[0028] 图3为本发明一种关节模组及协作机器人的散热装置带协作机器人整机结构示意图;[0029] 图4为本发明一种关节模组及协作机器人的散热装置的排气风扇结构示意图;[0030] 图5为本发明一种关节模组及协作机器人的散热装置的固管支架结构示意图;[0031] 图6为本发明一种关节模组及协作机器人的散热装置的三通管结构示意图;[0032] 图7为本发明一种关节模组及协作机器人的散热装置的导流罩结构示意图;[0033] 图8为本发明一种关节模组及协作机器人的散热装置的挡板结构示意图;[0034] 图9为本发明一种关节模组及协作机器人的散热装置的通风罩结构示意图;[0035] 图10为本发明一种关节模组及协作机器人的散热装置的顶盖结构示意图;[0036] 图11为本发明一种关节模组及协作机器人的散热装置的弹性片结构示意图;[0037] 图12为本发明一种关节模组及协作机器人的散热装置的进气嘴结构示意图;[0038] 图13为本发明一种关节模组及协作机器人的散热装置的关节壳体结构示意图。具体实施方式[0039] 下面结合具体实施方式对本发明做进一步阐述和说明。所述实施例仅是本公开内容的示范且不圈定限制范围。本发明中各个实施方式的技术特征在没有相互冲突的前提下,均可进行相应组合。[0040] 如图1和2所示,本实施例提供了一种关节模组的散热装置,其包括进气组件、引气组件、排气组件以及除湿组件;[0041] 所述进气组件包括:内部进气管11、弹性片13、橡胶圈12、固管支架4、三通管5、轴承2和进气嘴17;[0042] 所述引气组件包括关节壳体18和导流罩6;[0043] 所述排气组件包括关节模组输出轴1、排气风扇3和通风罩8;[0044] 所述除湿组件包括干燥剂10、挡板7和顶盖9;[0045] 其中,轴承2安装在关节模组的输出轴1上,固管支架4包括内圈和与内圈连接的若干支臂,固管支架4的内圈套坐在轴承2上,各支臂外端锁紧在关节壳体18上,弹性片13固定在固管支架4上,橡胶圈12则嵌于弹性片13中,所述三通管5具有一个气体入口和两个气体出口,其中一个气体出口通过内部进气管11穿过固管支架4并插入安装于关节壳体18上的进气嘴17;三通管5的气体入口通过进气管路连接外部气源,另一个气体出口连接出气管路,出气管路在使用时封堵住或者连接下一级关节模组进行供气;所述进气管路或出气管路中,至少一条管路穿过橡胶圈12,由橡胶圈12进行支撑;[0046] 所述关节壳体18上带有多组均布的带螺纹贯通孔,其中一组用于安装进气嘴17,其他的贯通孔则用于热气流的排出,导流罩6中间设置通孔,其通过其自有阶梯面嵌于关节壳体18内;[0047] 所述排气风扇3通过固定于关节模组输出轴1的台阶面上,通风罩8位于导流罩6上方,其固定在关节壳体18上;其中通风罩8顶部具有内凹的型腔,侧面布有多组出风口,每组出风口间开有引流槽;[0048] 挡板7与通风罩8连接,并利用通风罩8压紧在导流罩6上,导流罩6与挡板7间布有干燥剂10,顶盖9通过螺钉锁紧在通风罩8的型腔上,型腔内布有干燥剂10。[0049] 在本发明的一个优选实施例中,所述轴承2安装在关节模组的输出轴1的上端部;所述固管支架的内圈底部套坐在轴承上,固管支架整体位于输出轴1的上端部;所述弹性片13、橡胶圈12、三通管5均位于固管支架的上方。[0050] 如图5所示,本实施例的固管支架4包括内圈和与内圈连接的三个支臂,三个支臂呈120°间隔均匀分布。所述的固管支架4通过内圈套坐在轴承上,支臂外端利用第三铜锣柱16锁紧在关节壳体18。如图11所示,为本发明的弹性片结构示意图,本实施例的弹性片包含一个内圈和用于连接固管支架的固定端,内圈于固定端之间通过悬臂结构连接,使内圈可在一定范围内动作,弹性片13通过第二铜锣柱15锁紧在固管支架4上。橡胶圈12套设在弹性片的内圈上,橡胶圈12用于固定进气管路或出气管路,防止管路划伤、过弯堵塞。[0051] 如图1、2和13所示,所述关节壳体18作为关节模组的外壳;所述关节模组设置在关节外壳内部,关节壳体18的内壁上具有一块与关节模组轴向方向垂直的环形安装板,所述安装板上沿周向均布12个所述的带螺纹贯通孔,贯通孔贯通安装板的上下区域;其中一个带螺纹贯通孔用于安装进气嘴17,其余用作散热孔,进气嘴17如图12所示。[0052] 如图9所示,通风罩8外底部带有勾角槽,内底部带有四组缺口,所述挡板7如图8所述,其具有四组引脚,通过其引脚卡扣在通风罩8的四组缺口内,利用通风罩8压紧在导流罩6上;所述通风罩8还通过第一铜锣柱14与固管支架4锁紧连接。如图10所示,为顶盖示意图,顶盖9通过螺钉锁紧在通风罩8的型腔上。[0053] 如图6所示,所述三通管5连接的其中一条气体管路经橡胶圈12后穿过固管支架的内圈并贯穿关节模组的输出轴1与外部连接;另一条气体管路穿出关节外壳18与外部连接;上述两条气体管路任一条作为进气管路,另一条作为出气管路。[0054] 如图7所示,所述导流罩6沿气流方向呈渐缩喇叭状,其大径端与关节壳体18内壁固定连接,小径端设置所有通孔;且小径端与通风罩8之间预留有距离作为散热通道。[0055] 如图4所示,本发明的排气风扇3固定于关节模组输出轴1的台阶面上,关节模组输出轴1转动时带动排气风扇3转动,从而达到促进排除热气的目的。[0056] 工作时,外部气源产生气流,经由进气管路进入三通管,然后沿着内部进气管11到达进气嘴,并进入减速器内腔。三通管的另一路气体出口可以堵塞或者作为气源下一级关节模组的散热装置。[0057] 进入减速器内腔的气体吸热后通过关节壳体多组通气孔道排出,利用关节运行时的转动带动排气风扇工作,将带热气体经由导流罩、通风罩排出,而通风罩、导流罩及干燥剂等的组合结构则起到一定的防尘除湿作用;本发明在保证关节模组结构紧凑的前提下,达到了减速器散热、电机散热、驱动器散热等多级散热的效果,由多关节组成的协作机器人则通过三通管完成气流的分配,达到整机散热的效果。[0058] 如图3所示,本发明还提供了一种协作机器人的散热装置,所述协作机器人包括多个关节模组,每个关节模组上均设置有上述关节模组的散热装置;其中,相邻关节模组的散热装置的进气管路与出气管路相连接,形成连通的气路,即上一级散热装置的出气管路作为下一级级散热装置的气源;第一级关节模组的散热装置的进气管路连接气源,最后一级关节模组的散热装置的出气管路堵塞或关闭。协作机器人散热装置的工作原理与单级关节模组散热装置的工作原理相同。[0059] 需要说明的是,本发明的三通管除一个气体出口必须链接内部进气管11外,其与的两个接口可以以任意一个作为气体进口连接进气管路,另一个则相应的作为给下一级关节模组散热装置供气的气体出口连接出气管路。本发明这种进气管路和出气管路可以随意指定的设计方式使得散热装置适用于任意形式组装的协作机器人,而无需要求各关节模组之间必须满足特定的安装角度。[0060] 以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
专利地区:浙江
专利申请日期:2022-06-10
专利公开日期:2024-07-09
专利公告号:cn114932581b
以上信息来自国家知识产权局,如信息有误请联系我方更正!


